


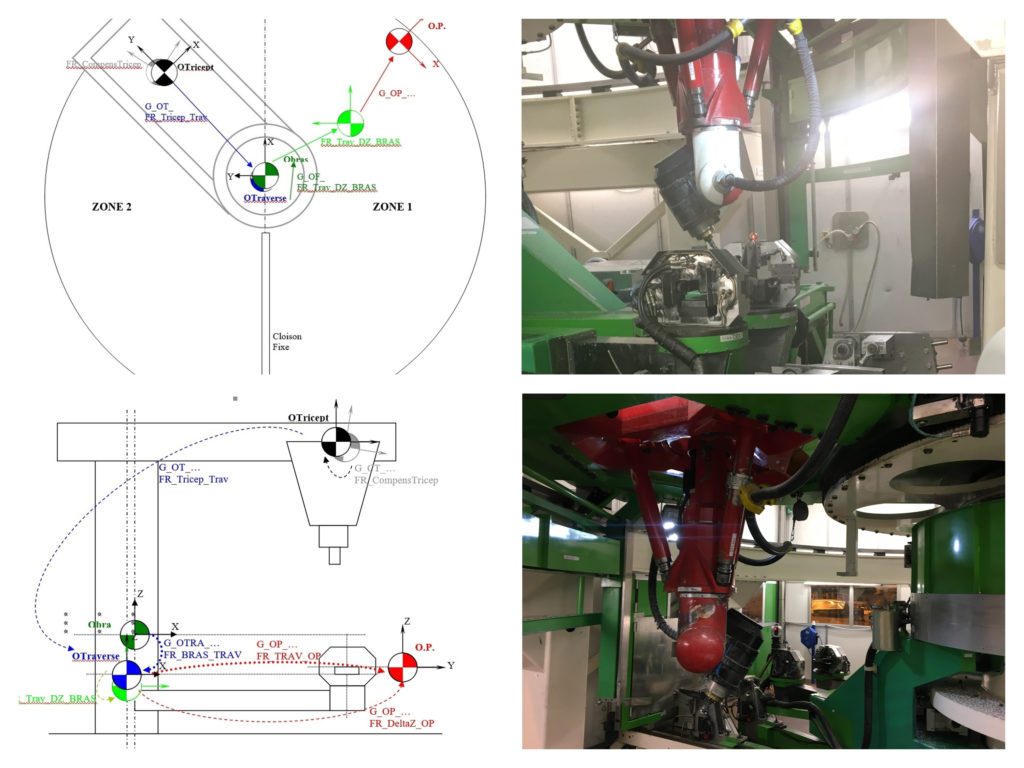
Géométrie Tricept PKM laser tracker
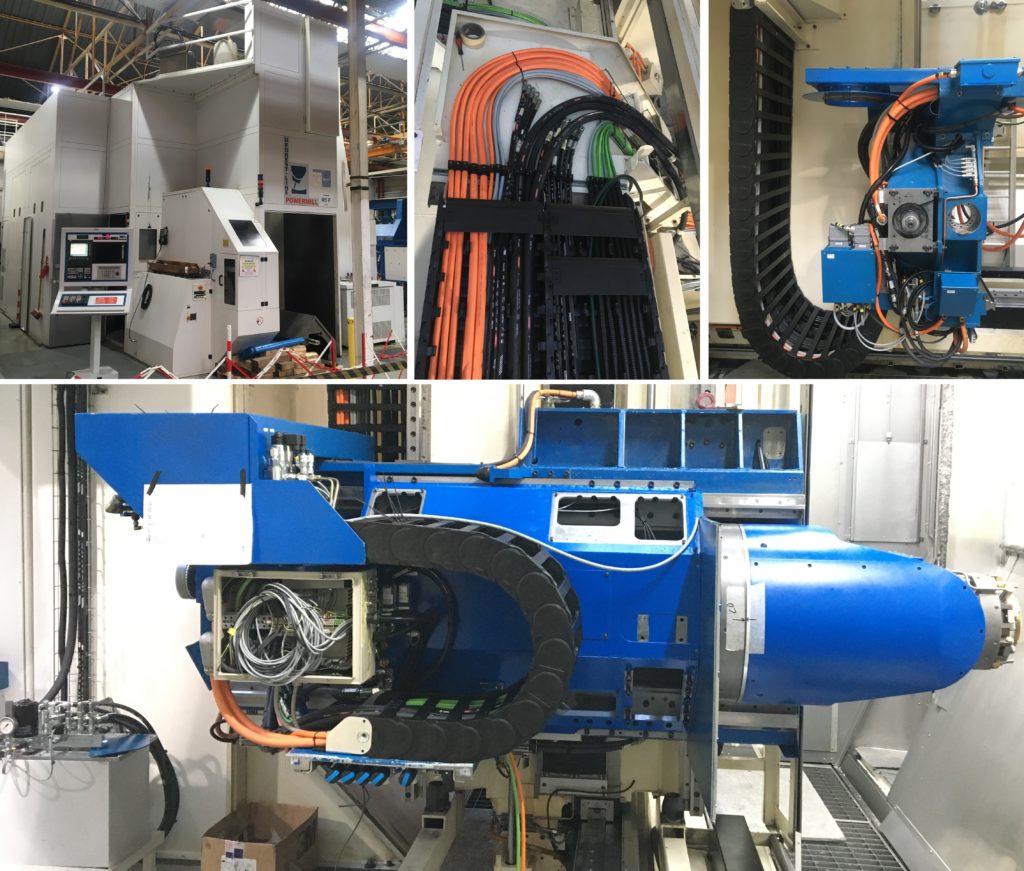
Géométrie d’une détoureuse avec robot Tricept embarqué.
La cellule est pilotée par 2 commandes numériques : Un robot "Tricept" 5 axes comprenant 3 vérins de translation et 2 axes poignets de rotation piloté par un CN 840D.Et…